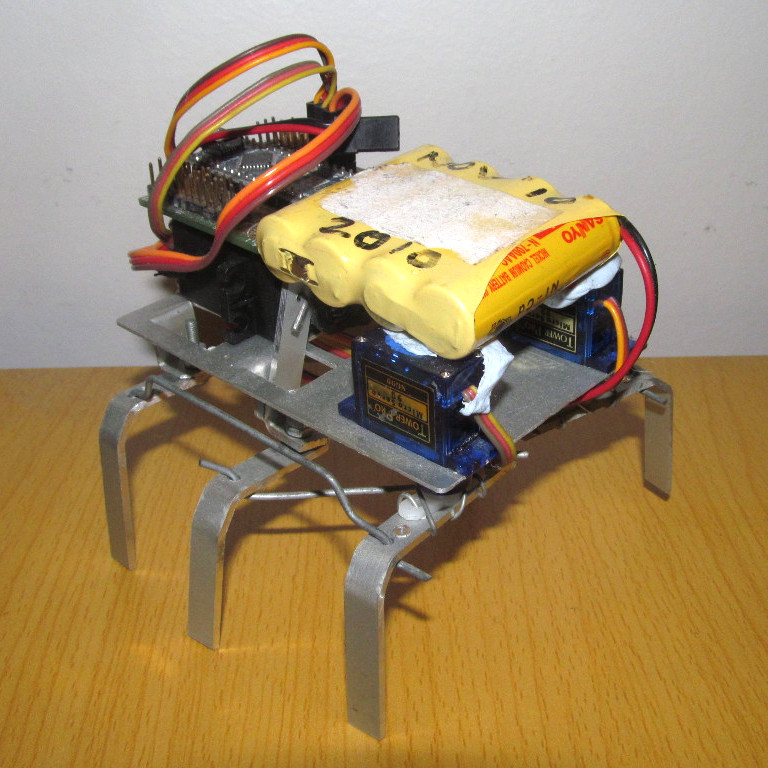
A walking robot!. After a discussion with a friend about walking robots, the challenge was laid down to build a walking robot as simply as possible. So I made the hacks-a-pod. Made from sheet aluminium, it uses three servo's to walk. Despite it's size it can carry a theoretical weight of 8kg. I've tested it up to 2kg, but was too scared to go further - it is only 11cm square (I aimed for 10cm, but mucked up some bends). I brought this robot out at an event at uni, and it featured on the news that evening! (Here at 1:10). It wasn't even related to the event.
This robot was designed using blender before it was built. CAD solved a lot of problems and saved a lot of time. Here's some photos and a video of it walking:
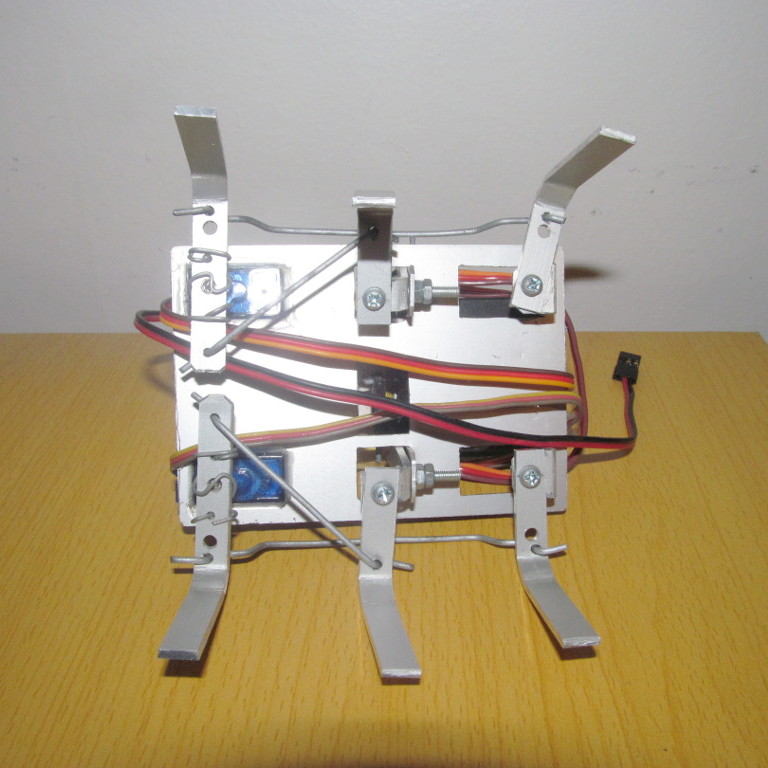
It is loosely based on the design over at Walking Robots, but I don't have access to the tools he does (namely the CNC waterjet cutter), nor did I want as many ball-link joints....