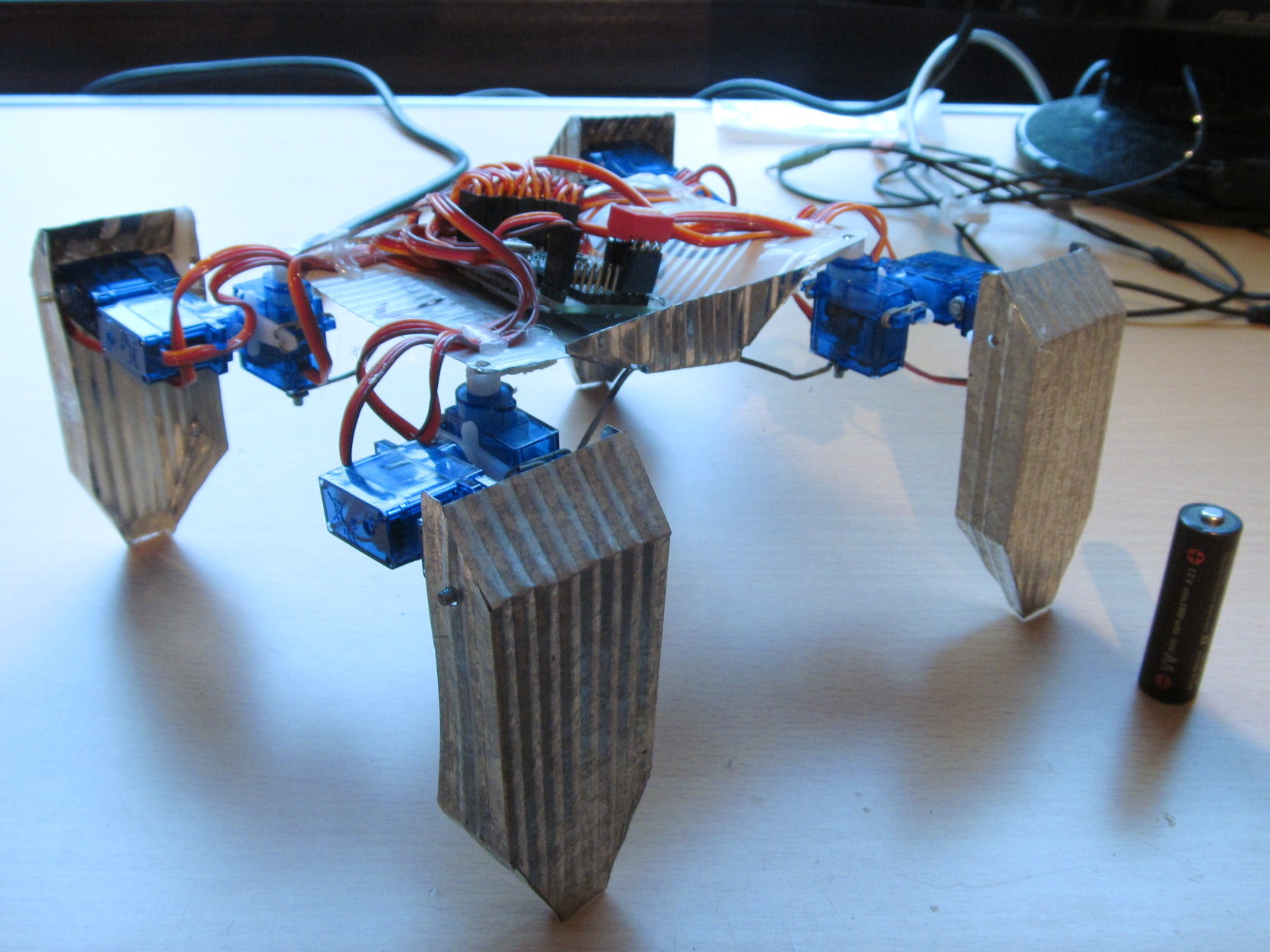
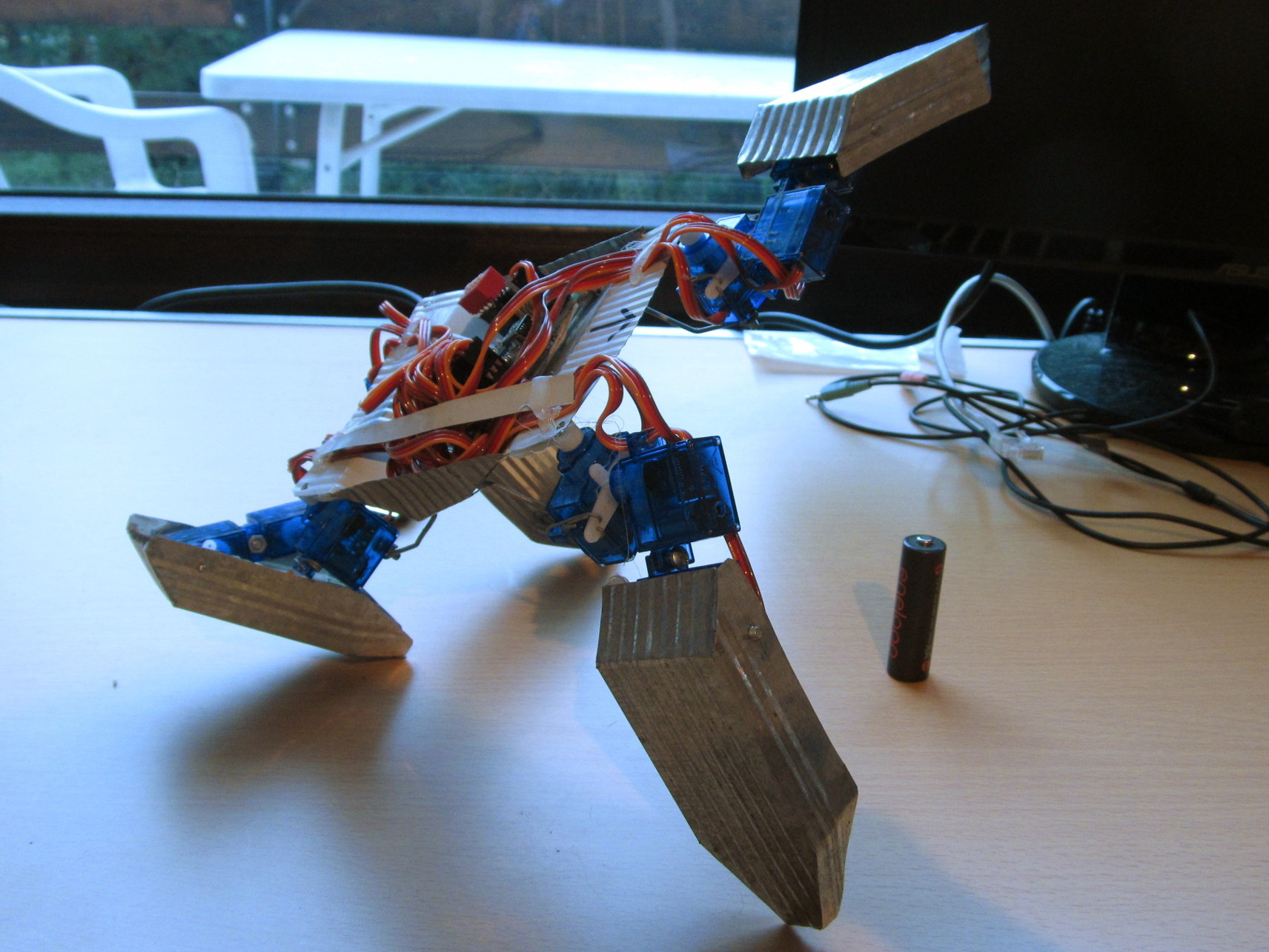
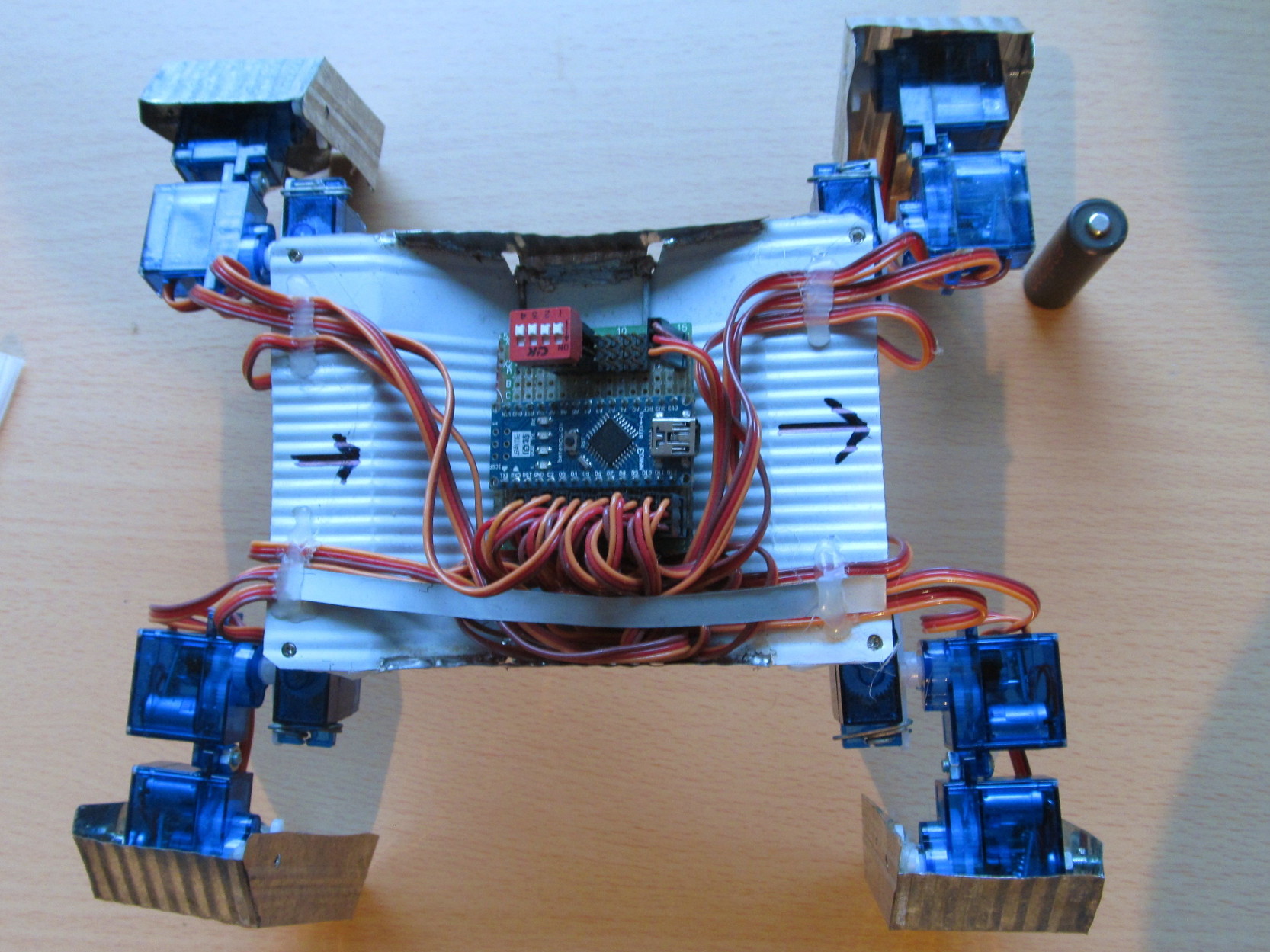
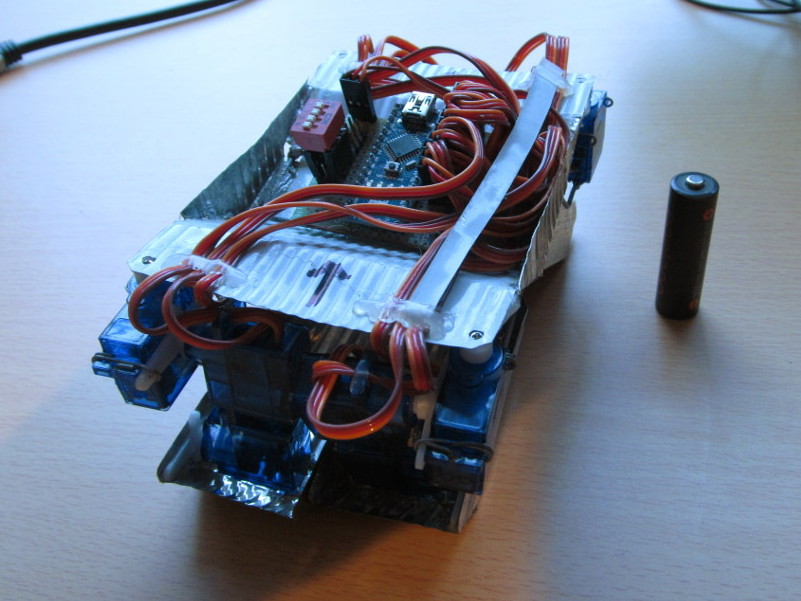
I always wanted a walking robot. So I built one! It's made from a bucket load of 9-gram servo's. Good thing they are so cheap. Even though each servo only draws ~150mA, by the time you have 12 of them all together you have a huge 1.8Amps. Ouch! The chassis is made from flattened food cans soldered together. The templates were designed in Blender, printed and cut out.
Blender Simulation
I simulated it in blender! This was as a bit of an extension to an assignment to derive the inverse kinematics for a robot arm. I guess I got carried away. The walk cycle is generated procedurally and would probably not work on a real robot due to the simulation not considering the center of mass. But it looks quite cool. The files for this are available at gitlab.
State
At the time when it was built the IK implementation had some issues. Now that I've got a working solution in Blender I should be able to port that across when I have some time! I'll probably need a more powerful processor unfortunately.