For a bit of a challenge I decided to make a small robot using off-the-shelf parts. The robot was intented to be able to locate and move small objects (such as marbles and dice), and to return with the objects to the starting position. On top of that it should measure less than 5cm cube and be cheap to make. And thus began a week of soldering with tweezers, hotgluing, and trying to squish as much as possible into a small space. A total of about 10 hours went into it's physical construction.
Overview
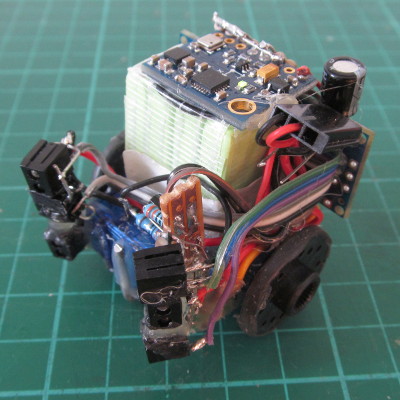
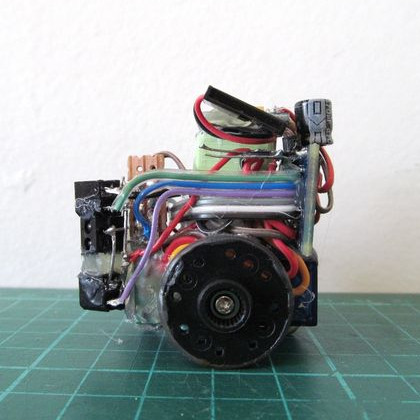
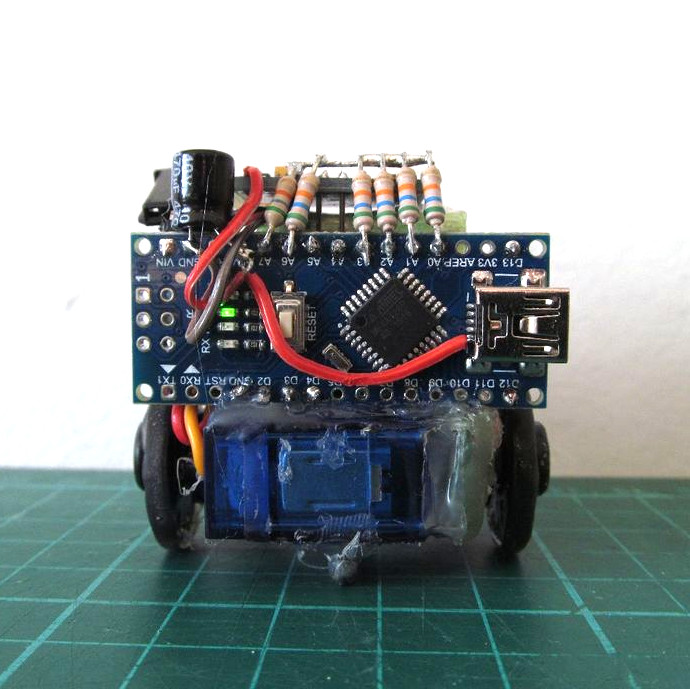
The 5cm cube sensor is one of the more sensor packed micro-robots I've made. It has a 10DOF board providing an accelerometer, gyro and compass, and it also has a total of six analog distance sensors. For motors it uses two cut-down 9-gram servos. To fit within the cube they had to be intersected with each other, which was quite a fun challenge. It is powered by a 4-cell Nimh pack that came from a 9V battery
State
Currently this robot sits on a shelf awaiting inspiration. It can wander around a maze and not bump into walls, and I've tested the IMU, but I haven't yet got any mapping going. The analog rangefinder had an issue with their sensing cone being too great, so detecting small objects did not work beyond a few centimeters.